摘要:在工業(yè)生產過程中,特別是在自動化程度高的設備中,均有一個圖形化界面,能對設備運行狀態(tài)進行遠程監(jiān)視與控制。隨著工業(yè)機器人的廣泛應用,在工業(yè)機器人搭建的生產線,工業(yè)機器人的運行狀態(tài)也必將在圖形化界面中進行監(jiān)控。在本文中,采用了ScreenMaker工具實現(xiàn)對工業(yè)注塑機機器人工作站的監(jiān)控。為了討論ScreenMaker界面的功能,選擇工業(yè)注塑機機器人為被控對象,工作站的變量與機器人位置狀態(tài)之間的關聯(lián)與實現(xiàn)等方法在文中被重點討論。
關鍵詞:ScreenMaker;位置與變量;信號連接;監(jiān)控
隨著工業(yè)技術的發(fā)展、工業(yè)機器人在生產中的廣泛應用、生產狀態(tài)監(jiān)控程度的提高,人們期望在控制室中能隨時觀看到機器人運行狀態(tài)、運行位置、工件生產的數(shù)量統(tǒng)計、乃至整個工廠運行狀態(tài),通常通過開發(fā)一個具有遠程控制、遠程監(jiān)視等功能的圖形化界面來實現(xiàn)。圖形化界面的開發(fā)工具現(xiàn)在有很多,有QtCreator、WxWidgets、VisualStudio開發(fā)環(huán)境、.NET編輯等進行。QtCreator使用在嵌入式開發(fā)系統(tǒng)中,VisualStudio包含一個針對C#開發(fā)的預定義設置集合和一個針對VisualBasic開發(fā)的預定義設置集合,用于生成ASP.NETWeb應用程序、XMLWebServices、桌面應用程序和移動應用程序,ScreenMark是在RobotStudio仿真軟件下用來創(chuàng)建用戶自定義圖形化界面的工具。
1.圖形化界面工具ScreenMark
圖形用戶界面(GUI)通過將機器人系統(tǒng)的內在工作轉化為圖形化的前端界面,從而簡化工業(yè)機器人的操作。如在示教器的GUI應用中,圖形化界面由多個屏幕組成,每個占用示教器觸屏的用戶窗口區(qū)域。每個屏幕又由一定數(shù)量的較小的圖形組成構成,并按照設計的布局進行擺放。常用的控件有(有時又稱作窗口部件或圖形組件)按鈕、菜單、圖像和文本框。
ScreenMaker是RobotStudio仿真軟件下用來創(chuàng)建用戶自定義界面的工具。使用該工具可創(chuàng)建自定義的操作員界面,編譯完成后可在示教器下監(jiān)控工業(yè)機器人的運行位置、生產產品的數(shù)量、生產狀態(tài)等,使用自定義的操作員界面在工廠實地能簡化機器人系統(tǒng)操作,操作員界面能在正確的時間以正確的格式將正確的信息顯示給用戶。ScreenMaker簡單易學,使用ScreenMaker工具無需學習Vi-sualStudio開發(fā)環(huán)境和.NET編輯,也可創(chuàng)建自定義的示教器圖形界面。本論文中開發(fā)的圖形化示教器界面如圖1所示。
圖1.示教器界面
2.RAPID程序與機器人信號之間的關聯(lián)
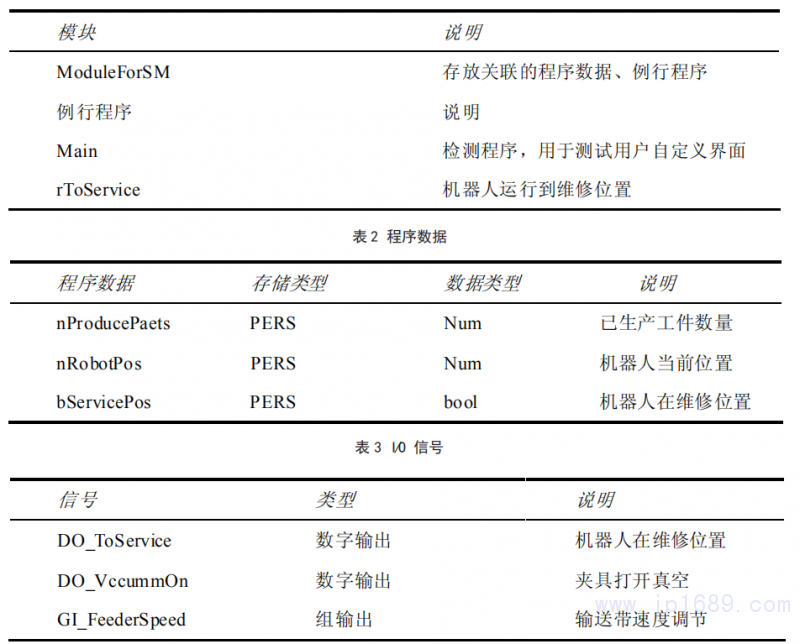
圖形化界面需要與機器人的PAPID程序、程序數(shù)據(jù)以及I/O信號進行關聯(lián)。為了調試方便,一般是RobotStudio中創(chuàng)建一個與真實一樣的工作站,在調試完成以后,再輸送到真實的機器人控制器中去。本論文中程序代碼、程序數(shù)據(jù)、I/O信號見表1、2、3所示。
3.注塑機注塑流程設計及程序實現(xiàn)
3.1注塑流程的設計
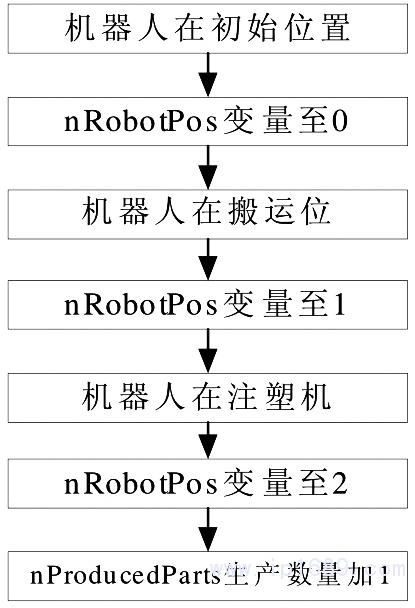
本論文中采用對注塑機加工的過程進行監(jiān)控,注塑機的整個過程如圖2所示。仿真生產線的流程設計如下:機器人運行至皮帶,然后提取物料進入注塑機、注塑機模擬加工、機器人從注塑機提取物料放入皮帶,注塑機停止運行,生產產品計數(shù)。
圖2仿真過程流程圖
3.2.注塑程序的編寫
RobotStudio軟件下,主要是為了對注塑機的運行狀態(tài)進行監(jiān)控。注塑機在運行至某一狀態(tài)時,均需將運行狀態(tài)反饋給示教器圖形化界面控件。其實現(xiàn)通過變量來完成。由于只對運行位置等狀態(tài)、產品生產數(shù)量進行監(jiān)視,程序編寫得相對比較簡單。位置移動程序采用MoveL或者MoveJ指令。MoveL指令為直線運動指令,指定起點和終點后,則從起點到終點的運動軌跡為直線,MoveJ指令則為多關節(jié)運動,在指定起點與終點后,運動軌跡的規(guī)劃則完全按照機器人內部的算法來規(guī)劃。下程序中的MoveLTarget_10,v100,z100,tool0\WObj:=wobj0;中,Target_10即為目標點,也即運動的初始點(起點為機器人當前位置),v100為運動速度,z100為拐角,tool0為工具坐標,wobj0為工件坐標,部分程序代碼如下。
...........................................................................................................
PERSnumnProducedParts:=624;//定義變量nProducedParts,賦初值
PERSnumnRobotPos:=2;//定義變量nRobotPos,賦初值PERSboolbServicePos:=TRUE;
..............................................................................................................
PROCmain()
MoveLpHome10,v1500,fine,tGripper;//機器人在Home位nRobotPos:=0;//機器人在Home位時,變量nRobotPos:=0WaitTime2;
................................................................................................................
MoveJpCovery10,v1500,fine,tGripper;//機器人在搬運位nRobotPos:=1;//機器人在皮帶位時,變量nRobotPos:=1WaitTime2;
..............................................................................................................
MoveJpInMachine,v1500,fine,tGripper;//機器人在注塑機中nRobotPos:=2;//機器人在注塑機中時,變量nRobotPos:=2WaitTime2;
..............................................................................................................
MoveJpService,v1500,fine,tGripper;nRobotPos:=3;//機器人在注塑機中WaitTime2;
..............................................................................................................
nProducedParts:=nProducedParts+1;//nProducedParts表示生產數(shù)量,每完成一次后生產數(shù)量加1
..............................................................................................................
ENDPROC
..............................................................................................................
PROCrToService()//維修時調用的rToService()
MoveJpService,v100,fine,tGripper;//移動到維修位bServicePos:=TRUE;
SetDO_ToService;//釋放夾具
Stop;//機器人停止運行
ENDPROC
..............................................................................................................
3.3注塑機器人變量與機器人的位置之間的聯(lián)系
在ScreenMaker界面中可以設置機器人當前位置圖片,機器人當前位置圖片與程序數(shù)據(jù)nRobotPos變量進行相關聯(lián),nRobotPos具體定義如下:
nRobotPos=0機器人在HOME點
nRobotPos=1機器人在輸送帶
nRobotPos=2機器人在注塑機中
nRobotPos=3機器人在維修位
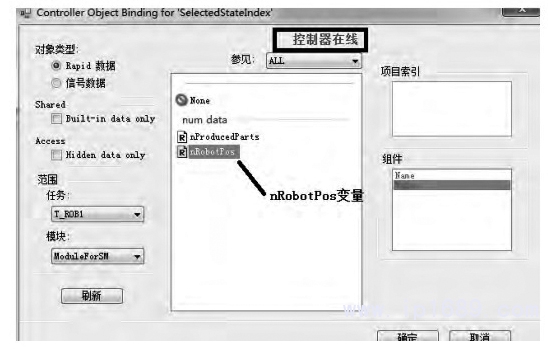
在編程的時候,在對應的位置對nRobotPos這個程序數(shù)據(jù)進行賦值,從而使界面作出相應響應。在ScreenMake界面的控件中選擇控制器在線、選擇nRobotPos變量,建立過程的界面如圖3所示。
圖3.進入nRobotPos變量與位置設定界面
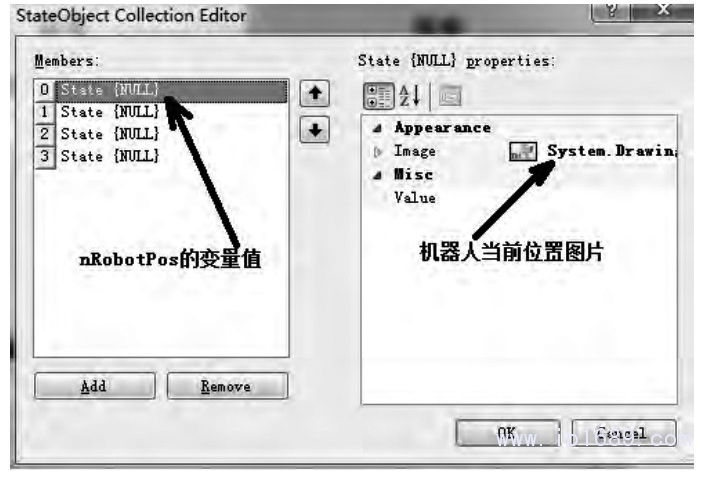
當選擇nRobotPos變量后,在建立nRobotPos的變量值后,建立nRobotPos變量值與機器人當前位置圖片的關聯(lián)關系,建立nRobotPos變量與機器人當前位置圖片之間的鏈接關系的界面如圖4所示。
圖4.nRobotPos變量與機器人當前位置圖片的關聯(lián)
4.圖像效果展示
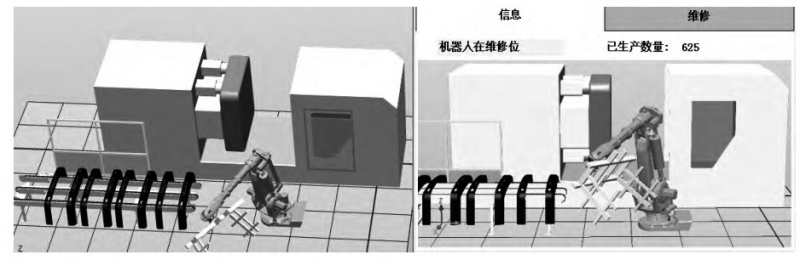
機器人在生產時,其生產過程將會實時顯示在示教器界面中。如圖5所示為機器人系統(tǒng)在維修時監(jiān)控到的畫面,圖5右側為仿真工作站機器人停留在維修位中的畫面,圖左側為示教器界面下監(jiān)控到的機器人在維修時的畫面,在示教器畫面的上面有文字提示機器人所處位置及生產零件的數(shù)量。
圖5.仿真碼垛搬運效果圖
表1.PAPID程序
5.結論
在本文中,探究了ScreenMakerGUI界面下,工業(yè)機器人運行狀態(tài)監(jiān)控的實現(xiàn)。為了探究其工業(yè)機器人監(jiān)控在ScreenMaker界面下的實現(xiàn),選取了一個注塑機工業(yè)機器人作為被控對象。由于主要是探究在ScreenMaker界面下,機器人運動狀態(tài)與RAPID程序中變量的關聯(lián)關系,因此注塑機器人工作站的實現(xiàn)過程相對比較簡單,注塑機器人主要包含三個位置狀態(tài):機器人在HOME點,機器人在輸送帶,機器人在注塑機,機器人在維修位。在不同的位置狀態(tài)下,nRobotPos具有不同的值,在ScreenMaker界面下,不同的值將顯示不同的文字與機器人運行狀態(tài)圖片。
























 聚砜醫(yī)療干粉吸入...
聚砜醫(yī)療干粉吸入... 塑料包裝材料的減...
塑料包裝材料的減... 汽車功能鍵觸摸蓋I...
汽車功能鍵觸摸蓋I... 高性能注塑聚丙烯...
高性能注塑聚丙烯...





